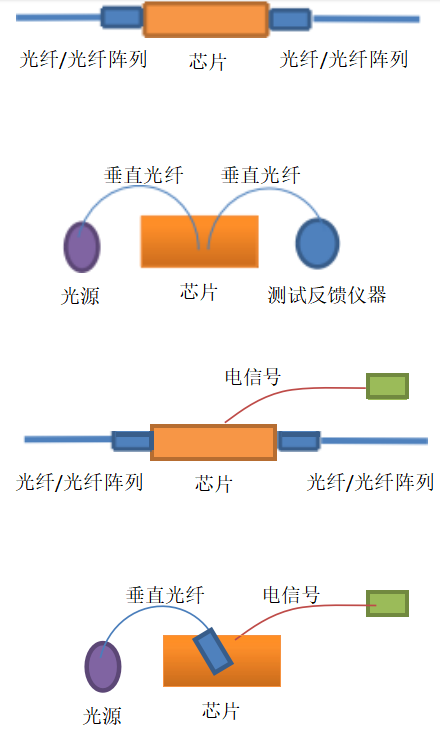
应用场景分析说明
| 应用场景分析说明 | |||
| 三轴 | 五轴 | 六轴 | |
| 水平单纤–芯片–水平单纤 | 一般 | 适合 | 适合 |
| 垂直单纤–芯片–垂直单纤 | 一般 | 一般 | 适合 |
| 水平光纤阵列–芯片 | 不适合 | 不适合 | 适合 |
| 垂直光纤阵列–芯片 | 不适合 | 不适合 | 适合 |
| 透镜耦合 | 不适合 | 有可能不适合 | 适合 |
选型详细说明:
基于骏河滑台开发设计MA-E2000-CUSTOM系列:


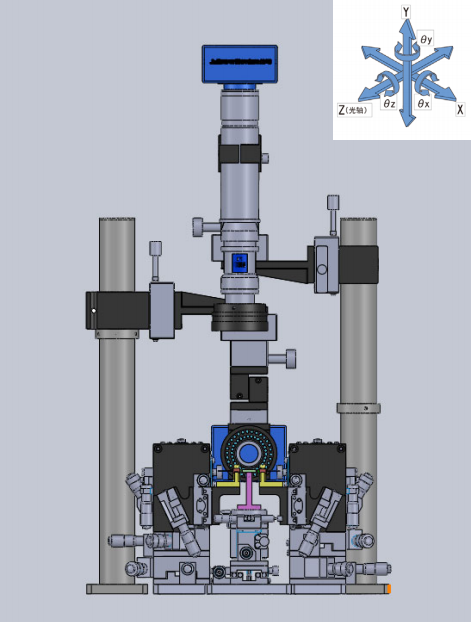
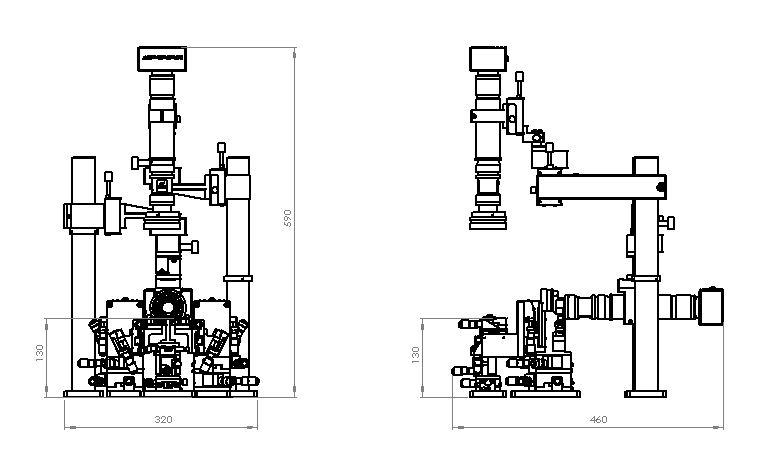
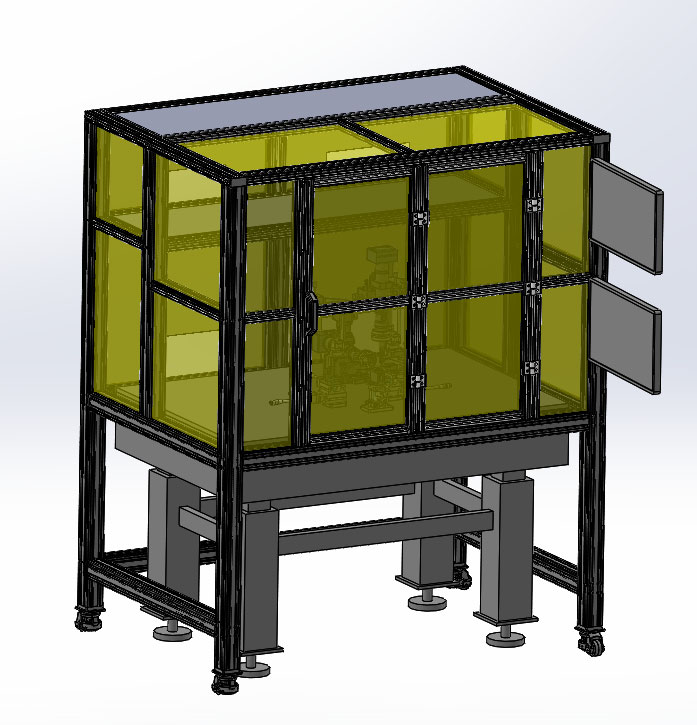
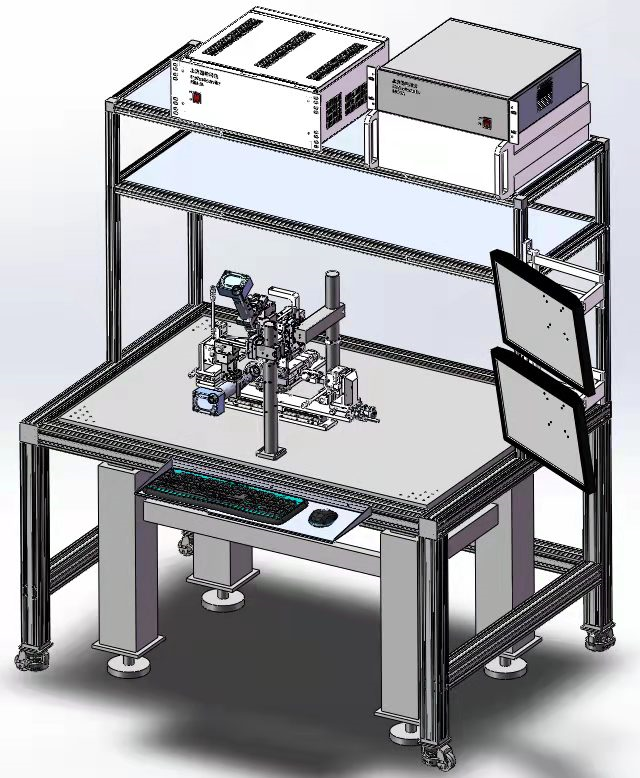
标准型:MA-E2000-CUSTOM 外形尺寸图
| SPEC | |||
| 核心设备 | 两边六轴 | XYZ | 粗调行程:13mm,精度:10μm/格;细调行程:0.6mm,精度:0.5μm/ 格;灵敏度:50nm,可以升级到20nm; |
| θXθY | 行程:5°;精度:约0.008 °/格;灵敏度:0.001 ° | ||
| θZ | 行程:8°;精度:约0.009 °/格;灵敏度:0.001 ° | ||
| 夹 具 | 定制:光纤夹具 | 水平/垂直/裸光纤/光纤阵列等 | |
| 定制:中间芯片夹具 | 真空/机械夹持/TEC温控 | ||
| 外围设备 | 观察系统 | 独立式多维度观察系统 | |
| 龙门式观察系统 | |||
| Optical platform | breadboard | ||
| 光学防震台 | |||
| 其他 | light source | ||
| 光功率计 | |||
| UV机 | |||
| 点胶机 | |||
| 探针座 | |||
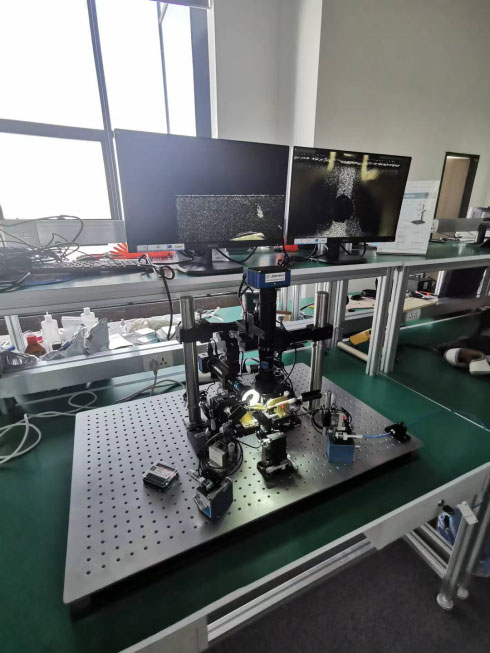
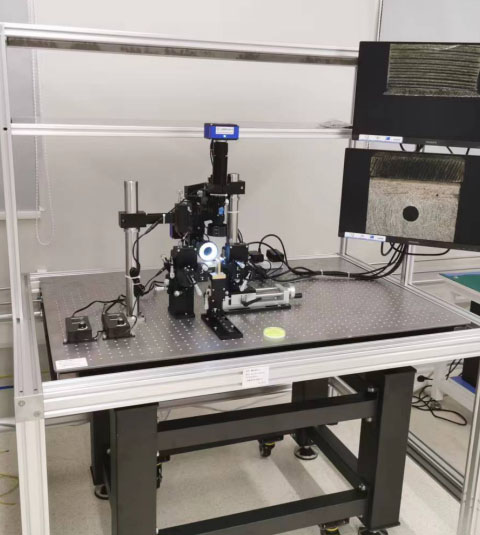
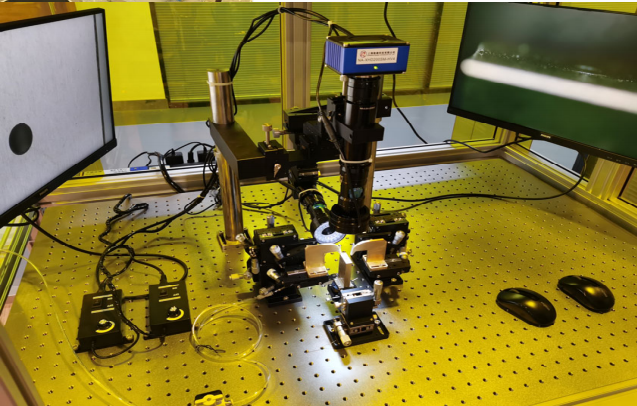
标准型手动光耦合系统,最适合光纤阵 列耦合,兼容单纤耦合。特别适合实验 室针对不同类型芯片的测试。如下:
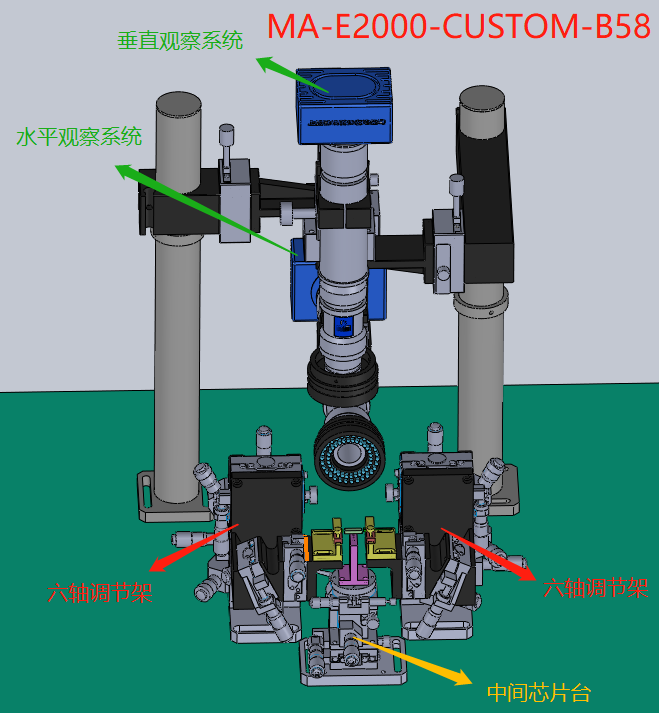
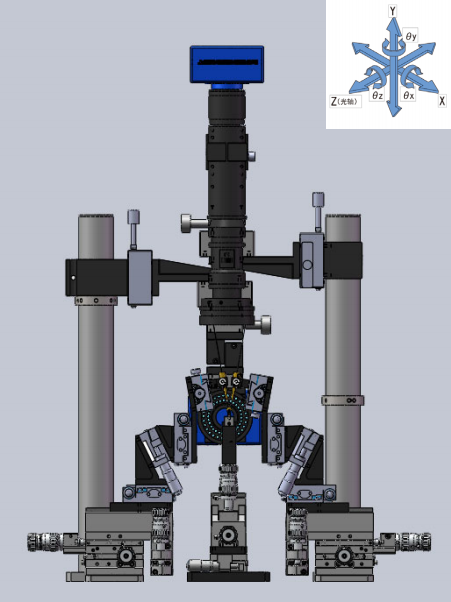
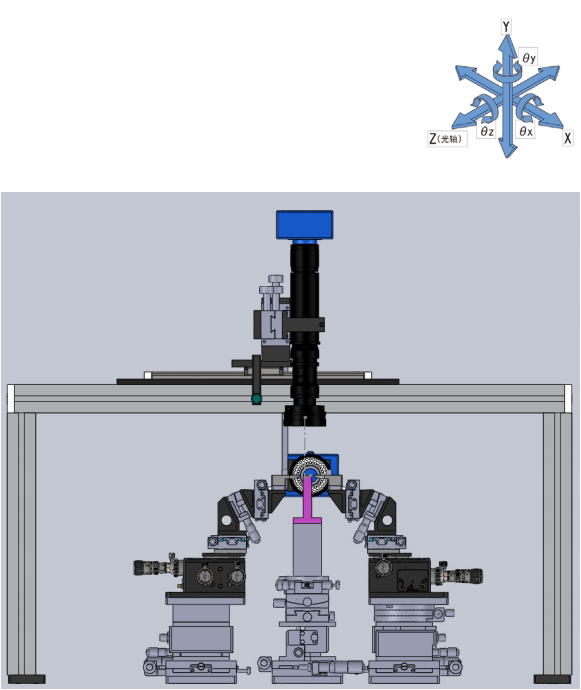
设计型:MA-E2000-CUSTOM-B58 外形尺寸图
| SPEC | |||
| 核心设备 |
两边六轴 |
XYZ | 粗调行程:13mm,精度:10μm/格;细调行程:0.6mm,精度:0.5μm/格;
灵敏度:50nm,可以升级到20nm; |
| θX | 行程:8°;精度:约0.006 °/格;灵敏度:0.001 ° | ||
| θY | 行程:14°;精度:约0.01 °/格;灵敏度:0.001 ° | ||
| θZ | 行程:8°;精度:约0.009 °/格;灵敏度:0.001 ° | ||
| 夹 具 | 定制:光纤夹具 | 水平/垂直/裸光纤/光纤阵列等 | |
| 定制:中间芯片夹具 | 真空/机械夹持/TEC温控 | ||
| 外围设备 | 观察系统 | 独立式多维度观察系统 | |
| 龙门式观察系统 | |||
| Optical platform | breadboard | ||
| 光学防震台 | |||
|
其他 |
light source | ||
| 光功率计 | |||
| UV机 | |||
| 点胶机 | |||
| 探针座 | |||
基于Newport滑台开发设计MA-562-CUSTOM系列:
.png)
标准型:MA-562-CUSTOM 外形尺寸图
| SPEC | |||
| 核心设备 |
两边六轴 |
XYZ | 粗调行程:13mm,精度:10μm/格;细调行程:0.2mm,精度:0.5μm/ 格;灵敏度:50nm ;(M-562F系列配DM-13系列) |
| θXθZ | 行程:行程:8°;精度:约0.006 °/格;灵敏度:0.001 ° | ||
| θY | 行程:14°;精度:约0.01 °/格;灵敏度:0.001 ° | ||
| 夹 具 | 定制:光纤夹具 | 水平/垂直/裸光纤/光纤阵列等 | |
| 定制:中间芯片夹具 | 真空/机械夹持/TEC温控 | ||
| 外围设备 | 观察系统 | 独立式多维度观察系统 | |
| 龙门式观察系统 | |||
| Optical platform | breadboard | ||
| 光学防震台 | |||
|
其他 |
light source | ||
| 光功率计 | |||
| UV机 | |||
| 点胶机 | |||
| 探针座 | |||
MA-562-CUSTOM手动光耦合系统,最适合光纤阵列耦合,兼容单纤耦合。特 别适合实验室针对不同类型芯片的测试。 如下:
.png)
.png)
基于Thorlabs滑台开发设计MA-MAX300-CUSTOM系列:
.png)
标准型:MA-MAX300-CUSTOM 外形尺寸图
| SPEC | |||
| 核心设备 |
两边六轴 |
XYZ | 粗调行程:4mm,精度:10μm/格;细调行程:0.3mm,精度:1μm/格;
灵敏度:100nm,可以升级到30nm; |
| θXθY | 行程:行程:8°;精度:约0.006 °/格;灵敏度:0.001 ° | ||
| θZ | 行程:14°;精度:约0.01 °/格;灵敏度:0.001 ° | ||
| 夹 具 | 定制:光纤夹具 | 水平/垂直/裸光纤/光纤阵列等 | |
| 定制:中间芯片夹具 | 真空/机械夹持/TEC温控 | ||
| 外围设备 | 观察系统 | 龙门架式多维度观察系统 | |
| 龙门式观察系统 | |||
| Optical platform | breadboard | ||
| 光学防震台 | |||
|
其他 |
light source | ||
| 光功率计 | |||
| UV机 | |||
| 点胶机 | |||
| 探针座 | |||
MA-MAX300-CUSTOM手动光耦合系统, 最适合光纤阵列耦合,兼容单纤耦合。 特别适合实验室针对不同类型芯片的测 试。如下:
.png)
.png)
耦合基本要求:
1、精密耦合调节台
2、带芯片夹具
3、水平/垂直光纤夹具
4、放置从垂直和水平观察CCD
5、手动
6、光学平台
7、光源
8、光功率计
9、UV机
10、点胶机
11、探针座
以PLC耦合为例
调整FA(带纤、单纤)与CHIP(芯片)之间的相对位置,使IL最小(通过对光找出最小值),上胶固化使FA与CHIP(芯片)之间固定
1、安装物料
光纤阵列与平面波导装配工艺由装夹CHIP开始,一旦CHIP和光纤阵列FA被装好,使用视觉系统将各组件调整到合适位置,然后进行预装配工艺。
如图1、2,输入光纤阵列(输出光纤阵列同理)需要与平面波导器件做精确的平行定位。
使用垂直和平行相机,所有位置仅用一次调整,就可实现平行定位的设置。夹具的精度将保证在以后的装配中保持其定位关系。
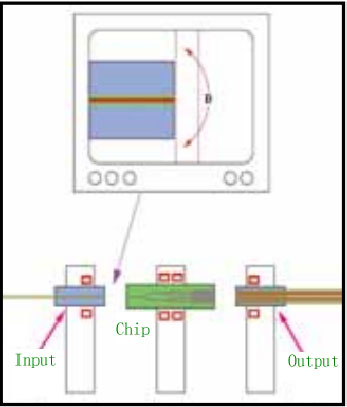

图1 图2
2、寻找初始光
组件装夹完成后,通过校正X,Y和Z方向的偏差来进行的初始光功率耦合,如图3所示,操作员通过图像(水平投影+垂直投影)显示出的各项偏差,然后手动调整来补偿偏差。
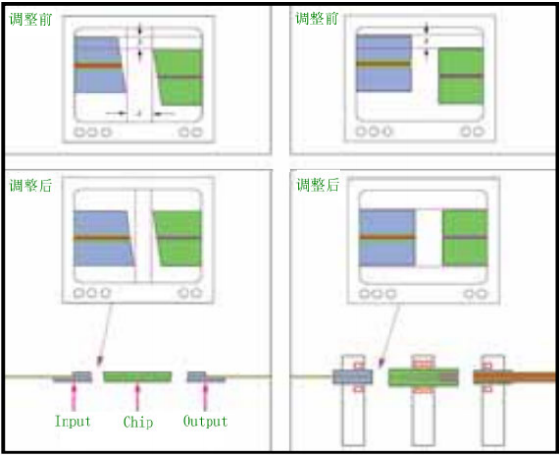

图3 图4
当三个器件完成初始定位,同时确认其在Z轴方向的相对位置关系后,这时需要确认输入光纤阵列和波导器件之间光的耦合对准。将物镜聚焦到波导器件的输出端面。通过物镜及初始光CCD,可以将波导输出端各通道的近场图像投射出来,进行适当耦合后,图像会被投射到显示器上。(图4)
3、耦合对准
这些有视觉辅助地初始光耦合的步骤是耦合工艺的一部分。在此工艺过程中,输入及输出光纤阵列和波导输入及输出端面的距离大约是100~200微米,以便通过使用机器视觉精密地校准预粘接间隙的测量(图6),为后面必要的旋转耦合留出安全的空间。旋转耦合技术的原理(图5)。大体上来讲,旋转耦合是通过使用线性偏移测量及旋转移动相结合的方法,将输出光纤阵列和波导的的第一个及最后一个通道进行耦合,并作出必要的更正调整。输出光纤阵列的第一个及最后一个通道和两个光探测器相联接。
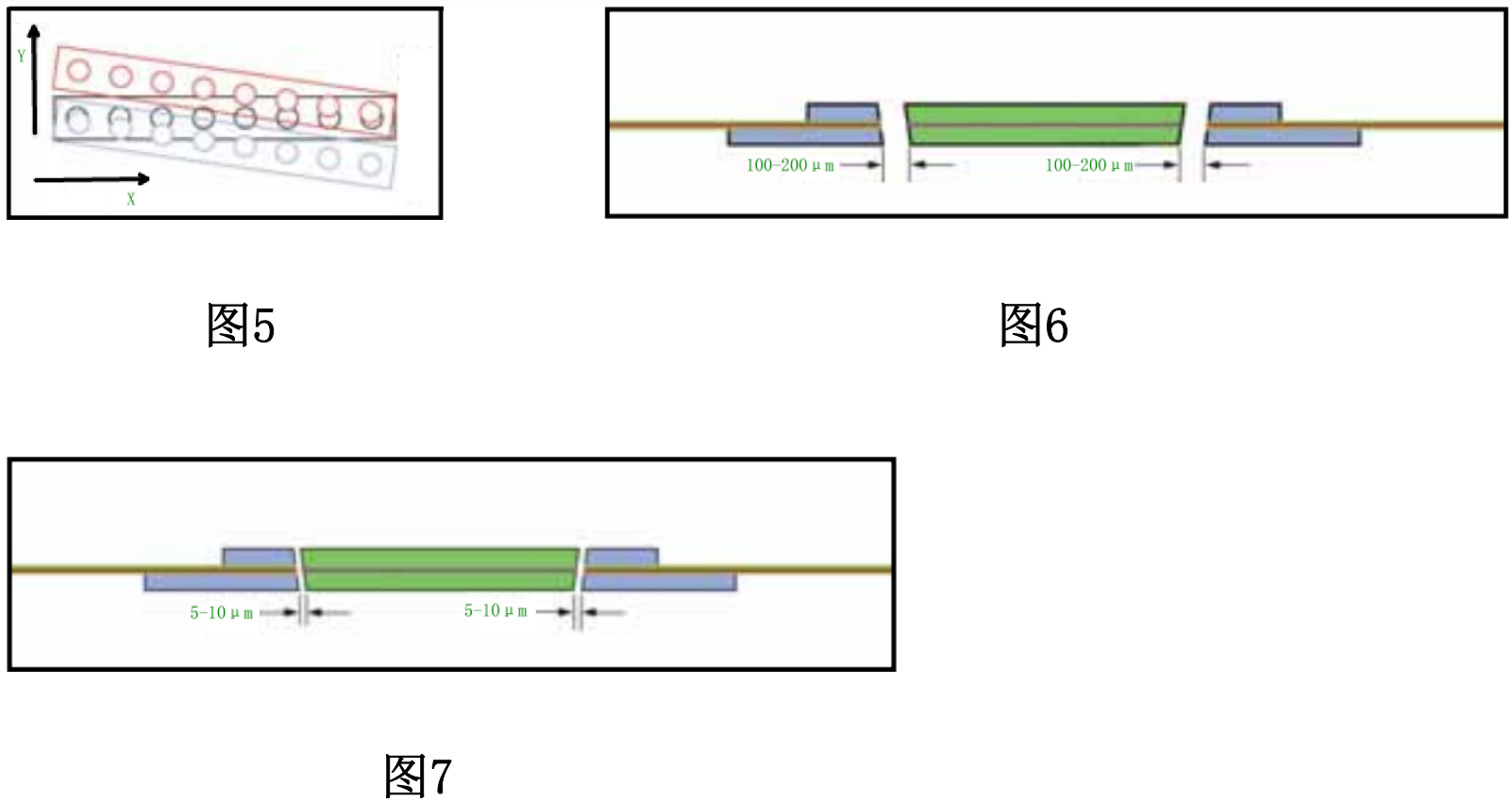
当三维的粗耦合结束后,手动将光纤阵列和波导端面的距离调整到预先设定的距离,一般大约为5~10微米,进行微耦合。可以通过接触确认零位,再后退10微米(图7)
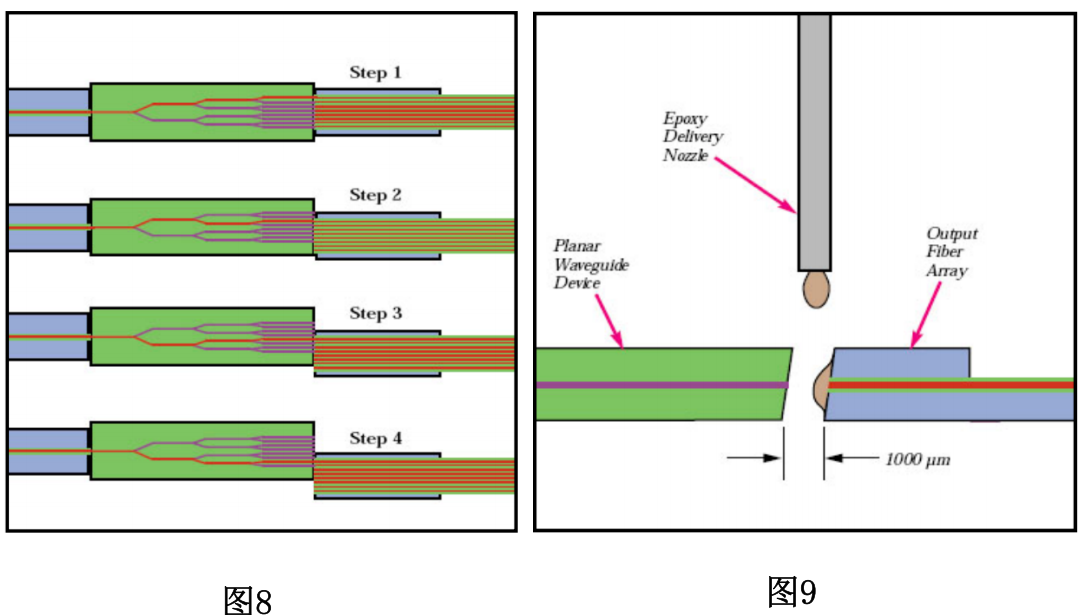
4、优化和点胶
在此过程中,可以用输出光纤阵列第一个通道,延X轴的方向对波导各通道进行扫描,以测量其各通道的光功率,见图8。在整个器件完成光耦合效率优化,并对输入及输出光纤阵列进行定位后,就可以使用自动点胶系统将各个器件进行粘接。其应用图示请见图9。
5、照射UV固化
6、下料
松开夹具,取下物料。